HK330 Computer CNC panel saw
Video sa Produkto
Ang computer CNC panel nakakita sa HK330
1. Sumala sa gilapdon sa input plate, guntinga ang gikinahanglan nga plato ug dali nga mobalik sa orihinal nga kahimtang sa pagtrabaho.
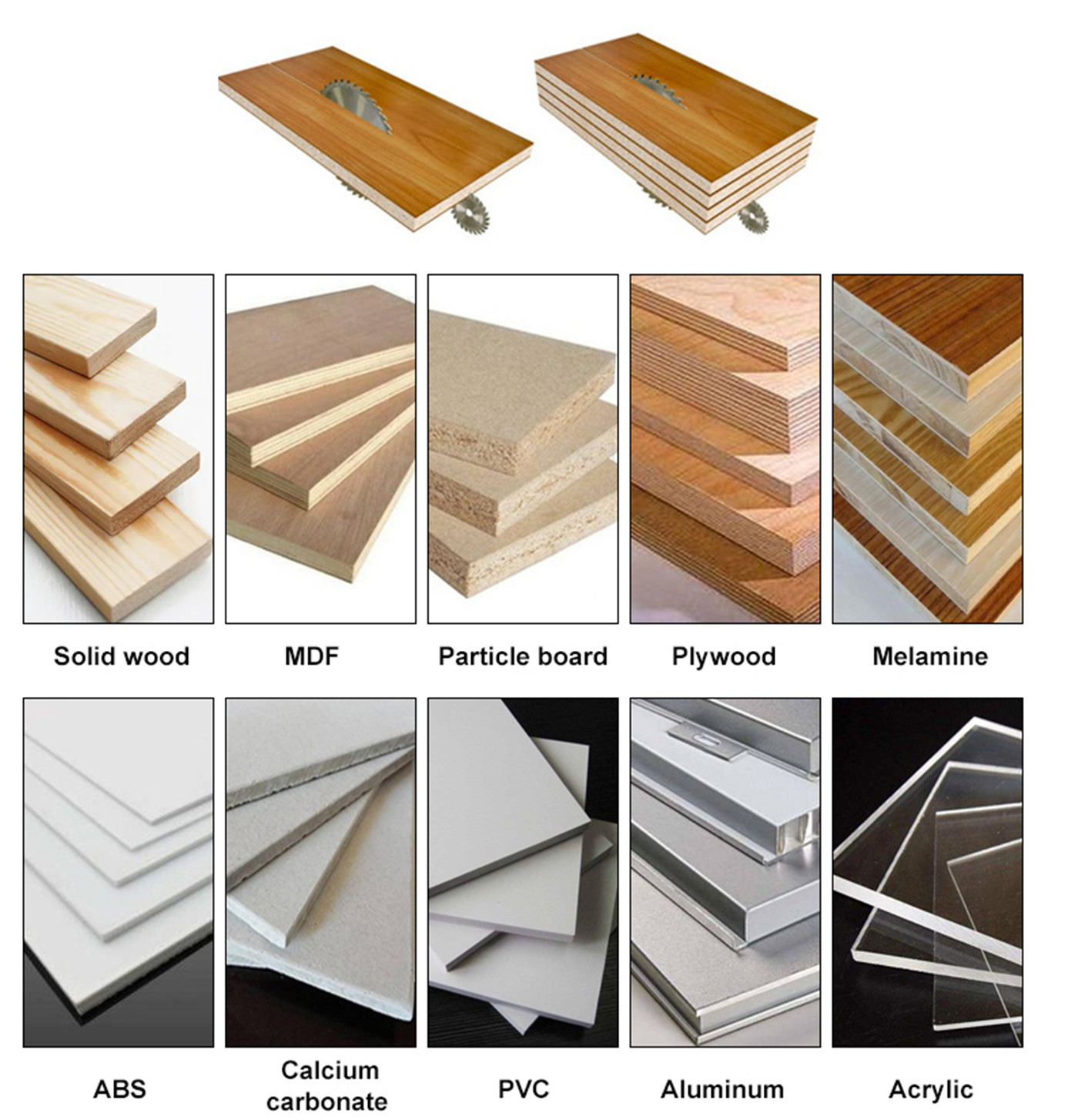
2. Ang katulin sa pagputol kontrolado sa frequency converter, nga makabuntog sa mga plato nga lainlaig gibag-on ug lain-laing mga materyales.
3. Ang pagpakaon nagsagop sa pneumatic floating bead table, ug ang bug-at nga plato nga materyal sayon nga usbon. Awtomatikong gipakaon ang robot, adunay ubos nga kusog sa pagtrabaho ug taas nga kahusayan sa produksiyon.
4. Gamita ang imported nga Delta servo motor aron mapapas ang artipisyal nga kasaypanan ug mapaayo ang dimensional nga katukma.
Teknikal nga mga parameter
| HK330 | PARAMETER |
| Pinakataas nga Katulin sa Pagputol | 0-80m/min |
| Max Carrier Maximum Speed | 100m/min |
| Main Saw Motor Power | 16.5kw(opsyonal 18.5kw) |
| Kinatibuk-ang Gahum | 26.5kw(opsyonal 28.5kw) |
| Kinatas-ang Gidak-on sa Pagtrabaho | 3300L*3300W*100H(mm) Opsyonal nga 120H(mm) |
| Minimum nga Working Size | 34L*45W(mm) |
| Kinatibuk-ang Gidak-on | 5300L*5950W*1900H(mm) |

Himamata ang mga kinahanglanon sa daghang pagproseso sa plato, nga adunay labing kadaghan nga gidak-on sa sawing nga 2800 * 2800mm ug usa ka gibag-on sa sawing nga 105mm, ug usa ka labi ka labi nga magamit

Servo mekanikal nga clamp nga kamot 11 usa ka pinakadako nga disenyo nga mekanikal nga clip

Ang robotic nga bukton nagsagop sa high-precision worm gear reducer ug feeding gear rack, nga adunay cutting accuracy nga ± 0.1mm
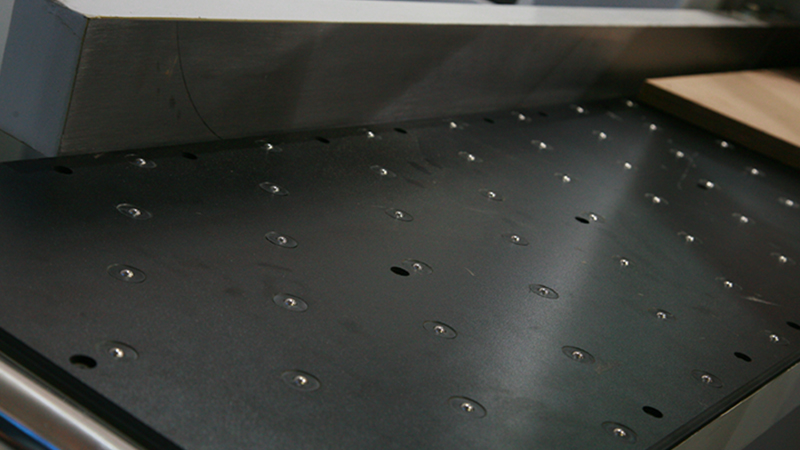
Ang worktable gihimo sa Pneumatic floating platform. sayon ra kaayo nga ibalhin ang mga panel
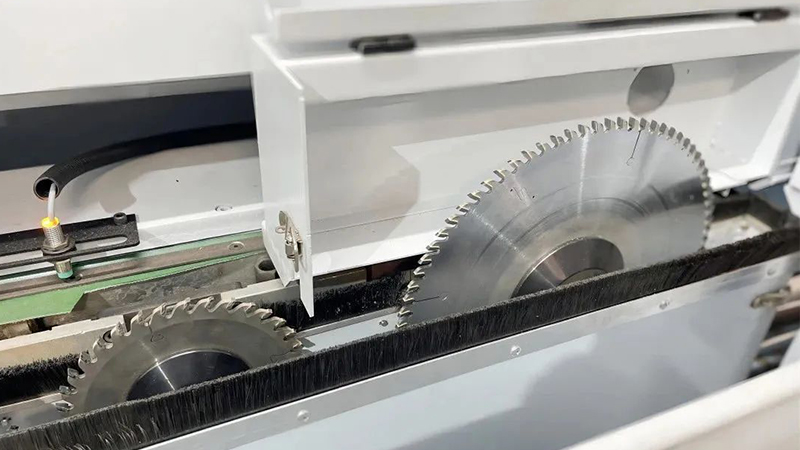
Ang scoring saw mahimong awtomatikong ibalhin sumala sa mga panginahanglan sa paggabas. Pakigtambayayong sa nag-unang gabas alang sa taas nga kalidad nga gabas
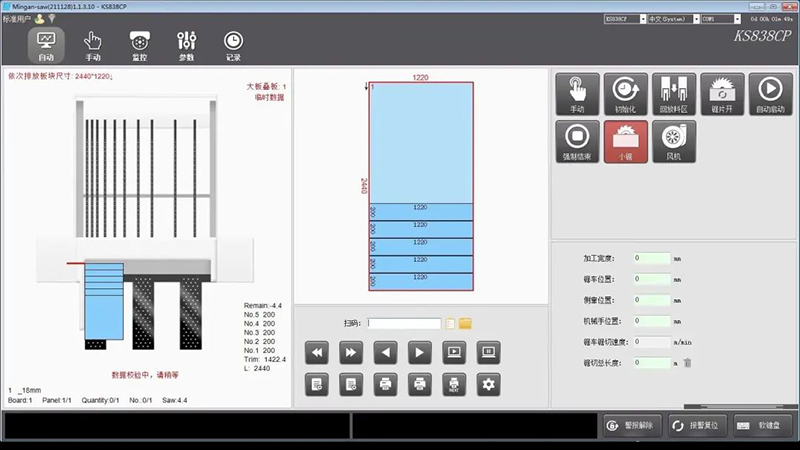
Opsyonal nga software sa pag-optimize alang sa awtomatikong pag-optimize sa layout sa materyal ug
paggabasComputer CNC panel saw
Sampol